The Sensitive Arm system provides real-time, low-latency force feedback while utilizing integrated torque sensors across all joints.
Kassow Robots , a leading manufacturer of 7-axis collaborative robots, announced its Sensitive Arm technology across its complete range of 7-axis collaborative robots. Introduced at Automate 2025 in Detroit, MI, this advanced force control system integrates high-resolution torque sensors into all seven joints of each robot, enabling manufacturers to automate delicate and contact-sensitive tasks with greater precision, safety and flexibility.
The Sensitive Arm system provides real-time, low-latency force feedback while utilizing integrated torque sensors across all joints. With a sensor resolution of up to 0.024 Nm/bit and a control frequency of 30 kHz, the system enables compliant and nuanced motions essential for complex tasks such as assembly, surface finishing, inspection and delicate handling.
“The Sensitive Arm is transforming how manufacturers approach automation of complex assembly and finishing operations,” said Dieter Pletscher, global sales manager at Kassow Robots. “Our customers are seeing immediate benefits in applications requiring controlled contact forces from precision assembly to surface finishing while maintaining the industrial strength and flexibility that Kassow Robots’ 7-axis design is known for.”
Operators can fine-tune how the robot responds to external forces using a dedicated interface that makes it easy to adjust parameters such as stiffness, damping and end-effector compliance. The system also enables one of the smoothest and most responsive hand-guiding experiences on the market, with minimal resistance and high sensitivity, enabling fast and intuitive programming by demonstration. This significantly reduces the time and complexity involved in deploying new applications.
By eliminating the need for external force and torque sensors, the Sensitive Arm simplifies system integration while improving feedback accuracy. It also improves collaborative safety by enabling faster, more reliable detection of impacts or unexpected contact, creating safer conditions for human-robot interaction on the factory floor.
The Sensitive Arm is available across Kassow Robots’ entire 7-axis collaborative robot portfolio, including new high-payload models, expanding automation possibilities for complex and sensitive tasks. Kassow Robots‘ expanded lineup now offers significantly greater payload capacities while maintaining precision and safety.
To learn how Kassow Robots is advancing collaborative robotics with the Sensitive Arm, please visit https://www.kassowrobots.com/.
In addition to distribution, we design and fabricate complete engineered systems, including hydraulic power units, electrical control panels, pneumatic panels & aluminum framing. Our advanced components and system solutions are found in a wide variety of industrial applications such as wind energy, solar energy, process control and more.
Bountourakis is a Greek manufacturing company specializing in HORECA equipment, supplying Inox stainless steel kitchen units, showcases, and tables—particularly well-known across Heraklion on Crete. To scale up its welding operations, the company turned to Kassow Robots’ partner Netelco S.A. Together, they implemented the KR1805 cobot, enabling flexible welding with both Laser and TIG technologies.
Challenge
A shortage of skilled welders was limiting Bountourakis’ ability to meet growing production demands. “Like a lot of businesses, we find it really hard to find someone who can weld and who can sometimes be flexible with their hours during busy times. As our production is on the island, it makes it even harder,” says Adonis Bountourakis, Head of Production of Bountourakis.
Despite having invested in a laser welder, the company lacked enough staff to operate it, causing significant delays—especially for small parts, which could take days to complete. The goal was to make welding easier, faster, and more scalable.
Solution
Netelco S.A delivered a custom robotic welding cell, equipped with a gripperchanger that allows the robot to switch between laser and TIG welding tools. The laser welder, provided by the customer, was successfully integrated into the setup by Netelco S.A. “We had an initial meeting, then the customer sent us the laser welder and asked us to do some welding with the robot. We showed him how it works. He was really happy with it and decided to go for Kassow Robots. It was a really smooth process”, says Anastasios Paraskevopoulos, sales rep at Netelco S.A.
Thanks to the KR1805’s long reach and 7th axis, the robot is now capable of welding a wide variety of parts such as refrigerators, cooking appliances, ovens and washing /hygiene units—and ready to handle more complex tasks in the future.
Benefits
Bountourakis highlights the ease of use, flexibility, and robustness of the KR1805 cobot. The company has significantly increased its welding throughput while reducing dependence on manual labor—scaling production and staying competitive in a demanding market.
Curious to see how others are automating welding with Kassow Robots? Check out another use case where a flexible cobot setup made all the difference.
In addition to distribution, we design and fabricate complete engineered systems, including hydraulic power units, electrical control panels, pneumatic panels & aluminum framing. Our advanced components and system solutions are found in a wide variety of industrial applications such as wind energy, solar energy, process control and more.
Navigating the complex world of robotics integration can be daunting, especially when faced with the varied costs and technical specifications.
The question, “How much does a robot cost?” is not easily answered as the price is influenced by various factors, such as; technology, application, and design.
In this article, we’ll navigate through the confusing world of robot pricing to provide a clear and detailed breakdown of the costs involved.
By understanding these key elements, you’ll be better equipped to make informed decisions that suit your budget and operational goals.
Stay with us as we discuss the specifics and shed light on how to effectively manage these investments.
Key Takeaways
Cost Influences
Technology Level: Advanced technologies such as AI, machine learning, and real-time data processing greatly increase a robot’s cost.
Design Customization: Custom features tailored to specific tasks or environments can escalate costs due to specialized design and production.
Application Specificity: Robots designed for specific industries or critical tasks often come with a higher price tag due to the specialized capabilities and certifications required.
Types and Costs
Industrial Robots: Essential for tasks like welding and assembly, with prices typically ranging from [$25,000 to $400,000] depending on functionality and sophistication.
Cobots: Designed for safe interaction with humans in shared spaces, generally cost between [$15,000 and $45,000], reflecting their accessibility and technological features.
Cartesian Robots: Ideal for precise linear motions, used in applications such as 3D printing, priced between [$10,000 and $50,000] based on size and precision capabilities.
Humanoids: Advanced robots mimicking human behaviour, significantly more expensive, typically starting at [$100,000 and can exceed $1 million], due to high-level AI and mobility technologies.
Considerations
Application Suitability: Ensure the robot’s capabilities align with the intended tasks and operational demands.
System Compatibility: Assess integration needs with existing systems to avoid additional costs for modifications.
Maintenance Expenses: Consider ongoing maintenance costs, availability of parts, and technical support to ensure sustainable operations.
Training and Integration Costs: Significant resources are needed for training on the proper use and maintenance of new robotics systems to ensure safety and efficiency.
Adaptability and Longevity: Robots that can be easily reprogrammed or upgraded can adapt to changes and extend their useful life, offering better long-term value.
ROI Metrics: It’s crucial to define metrics to assess the return on investment from robotics, considering financial returns as well as quality, efficiency, and customer satisfaction improvements.
What influences the price of a robot
When considering a robot purchase, it’s important to understand the characteristics that contribute to its price.
The cost can be greatly influenced by the robot’s design complexity, materials used, the technology it incorporates, and its intended application.
Factors such as the precision of tasks it performs, the software it requires, and additional features like sensing and vision systems also play a role.
For more detailed insights on a specific robot model, like the 7-axis collaborative robot models from Kassow Robots, each specification adds layers to the cost.
Technology and Software
The sophistication of the technology and software within a robot influences its price. High-end robots incorporate advanced algorithms for pathfinding, autonomous decision-making, and machine learning, which require substantial investment in research and development.
Additionally, user interface software that enhances the usability and functionality of the robot also adds to the cost.
These systems must be continually updated and optimized to handle complex tasks and easily interact with human operators and other automated systems.
The integration of Internet of Things (IoT) connectivity and real-time data processing capabilities further escalates the price, making the robot more adaptable and efficient but also more expensive.
Design and Customization
The level of design and customization involved in a robot’s creation directly impacts its cost.
Robots designed with specific requirements for particular industrial tasks, such as extra limbs, specialized tools, or enhanced mobility features, require unique engineering and design solutions.
Each custom feature needs to be planned and tested, which increases the research and development cost.
Furthermore, specialized designs often necessitate the use of unique components and technologies not typically found in standard robots, driving up manufacturing complexity and costs.
This custom engineering ensures the robot can perform designated tasks efficiently but also results in a higher price tag due to the increased labour and material costs involved in its production.
Material and Build Quality
The choice of materials in robot construction is essential as it affects both the durability and functionality of the robot, which influences its cost.
High-quality materials that can withstand high stress, wear, and environmental conditions are necessary to ensure the longevity and reliability of the robot. These materials often come at a premium, especially when they are lightweight yet strong metals or composites that offer superior performance.
Additionally, the precision required in machining and assembling these high-grade materials increases manufacturing costs.
Robots built with less expensive materials may reduce upfront costs but can lead to higher maintenance expenses and shorter lifespans, which could increase overall costs in the long run.
Application and Industry
Robots are increasingly tailored for specific industries, which can affect their costs. For example, robots designed for the healthcare sector may require precise and gentle handling capabilities, sophisticated diagnostic tools, and compliance with strict regulatory standards.
Similarly, robots used in manufacturing might need to handle heavy loads, perform at high speeds, and operate continuously. These specialized capabilities need advanced technology and strong construction, which increases the costs.
Additionally, the critical nature of tasks performed by these robots often requires extensive safety features and redundancy systems, further increasing their price.
Image Source: Alexander Burkle / Kassow Robots
Production Volume and Economies of Scale
The production volume of robots can also influence their cost. Limited production runs are more expensive on a per-unit basis because they cannot capitalize on the economies of scale enjoyed by mass-produced models.
Custom or low-volume robots often require specialized assembly processes and parts, which are more expensive than those used in high-volume manufacturing.
Conversely, when robots are produced in large quantities, the cost per unit decreases due to more streamlined manufacturing processes and bulk purchasing of materials. Therefore, companies looking to use robots extensively might find it more cost-effective to invest in models that are produced on a larger scale.
Research and Development Costs
The investment in research and development (R&D) impacts the cost of robots. Developing clever robotic technologies often requires time and resources in R&D to create, test, and refine advanced systems.
This includes the costs associated with prototyping, simulation, and field testing to ensure that the robots meet specific performance criteria and safety standards.
Regulatory Compliance and Certification
Robots must often meet various regulatory and safety standards, which can vary widely depending on the industry and the region in which they are sold.
Compliance with these regulations can involve additional costs related to certification processes, modifications to meet specific legal requirements and ongoing compliance monitoring.
For example, robots used in pharmaceutical or food production environments must adhere to especially strict standards, adding to their overall cost.
Training and Support Services
The complexity of modern robots often requires training for end-users. The cost of providing training programs, user manuals, and technical support can be considerable.
Additionally, ongoing support services, including maintenance and updates to software and hardware, also contribute to the total cost of ownership of a robot.
Supply Chain and Logistics
The cost of parts and the complexity of the supply chain logistics involved in sourcing and assembling robot parts can affect the final price of the robot.
Fluctuations in material costs, tariffs, and transportation fees, as well as the efficiency of the supply chain, can all impact costs.
Robust supply chains are essential for timely and cost-effective production but can be expensive to establish and maintain.
Brand and Market Positioning
The brand reputation and market positioning of the robot manufacturer can also play a role in pricing.
Established brands with a proven track record of reliability and excellent service might charge a premium for their robots.
Additionally, pricing strategies may vary based on market positioning, with some brands positioning themselves as providers of cost-effective solutions while others target the luxury or high-performance segment of the market
Types of robots and their price tags
Industrial robots
Industrial robots are essential in modern manufacturing, capable of performing a variety of tasks including welding, painting, and assembly with incredible precision and efficiency.
The cost of these robots is determined by factors such as payload capacity, reach, speed, and the level of customization required.
Basic models start at lower prices, which typically include a controller and basic software. More advanced models with comprehensive customization options, higher payload capacities, and enhanced capabilities will have a higher price tag.
Such price variations reflect the various needs of different industries, from automotive to electronics, where the demands on robotic systems differ widely.
The substantial range in prices ([$25,000 – $400,000]) accommodates businesses of all sizes, from small manufacturers to large enterprises with heavy-duty requirements.
Unlike traditional industrial robots, cobots are equipped with advanced sensors and safety features to ensure safe operation without the need for protective barriers.
The cost of cobots varies depending on their design, payload, and the complexity of the tasks they are programmed to perform.
Prices for simpler models that perform light duties have a smaller price tag when compared with more advanced models equipped with high-tech features such as vision systems and enhanced learning capabilities.
This price range [$10,000 – $50,000] reflects the growing market for robots that are accessible to small and medium-sized enterprises and not just large manufacturing facilities.
Cartesian robots are characterized by their three principal axes of movement — X, Y, and Z — which makes them ideal for precise linear applications such as 3D printing, CNC machining, and assembly operations where high accuracy is required.
The simplicity of their design generally makes them more affordable than more complex robotic systems.
Prices for Cartesian robots can range from about [$10,000 – $50,000] with the more basic models costing a lot less than models with better reach and load capacity, precision capabilities, and customized control systems.
This cost range supports industries that require precise, repetitive movements in a controlled environment.
Humanoids
Humanoid robots are among the most technologically advanced types of robots, designed to replicate human motion and interaction.
They use sophisticated AI, machine learning algorithms, and sensory systems to navigate complex conditions and perform varied tasks.
Due to their sophistication and the technology required, humanoid robots are typically the most expensive.
Prices range from roughly [$100,000 – $1 million] with the more advanced models, equipped with the most advanced features and capabilities, having the highest prices
These robots are mainly used in research, healthcare, and service industries where human-like interaction and adaptability are crucial.
This price bracket highlights the cutting-edge nature of humanoid robotics and the investment required for their development and deployment.
What to consider before buying a robot
Before purchasing a robot, it’s essential to define your needs and consider factors like compatibility with existing systems, long-term costs, and potential operational enhancements.
We are here to help you select a robot that aligns with your operational goals, ensuring efficiency, compliance, and a solid return on investment.
Let’s take a deeper look.
Define the Purpose and Requirements
Before investing in a robot, clearly define what you need the robot to achieve. Consider the tasks it will perform — whether it’s assembly, packaging, inspection, palletizing,labelling, or quality control.
This will help determine the type of robot you need, such as industrial, collaborative, or service robots.
Different tasks require different levels of precision, speed, and payload capacity. Aligning your business needs with the robot’s application capabilities ensures that you select a robot that can meet your operational goals without overspending on unnecessary features.
Compatibility With Existing Systems
Evaluate the compatibility of the new robot with your current machinery and software systems.
It’s important to make sure that the robot can integrate into existing production lines or work environments. Check if additional equipment or software is needed for integration and whether the robot supports the communication protocols used in your facility.
Incompatibility can lead to additional costs for modifications or updates to your systems, so prior confirmation will save time and resources in the long run.
Scalability and Flexibility
Consider the scalability of the robotic system. As your business grows, your robotic needs might change, requiring different functionalities or additional units.
Choose robots that are known for their flexibility in handling various tasks or those that can be easily upgraded with new capabilities.
Investing in scalable and flexible systems can prevent future bottlenecks and reduce the need for complete overhauls as your operation expands.
Maintenance and Support
Understanding the maintenance needs and the support available for a robot is essential. Ask about the maintenance schedule, availability of spare parts, and the technical support provided by the manufacturer.
Robots with high maintenance costs can affect the total cost of ownership. Also, consider the availability of local service technicians who can perform repairs and regular maintenance to minimize downtime.
Total Cost of Ownership
Beyond the initial purchase price, assess the total cost of ownership, which includes installation, maintenance, training, and potential downtime costs.
Estimate energy requirements, consumables, and whether the robot will need regular software updates. A cost analysis will help in making an informed decision by comparing the long-term financial impacts of different robotic systems on your operations.
Regulatory Compliance and Safety Standards
Before investing in a robot, ensure it meets all relevant regulatory and safety standards for your industry and region. Compliance is vital in sectors such as healthcare, food processing, and automotive manufacturing, where safety and precision are important.
Non-compliance can lead to legal issues, fines, or operational halts, which can be costly. Understanding the certifications that the robot has, such as ISO standards or specific industry compliance, is needed to protect your operations and ensure worker safety.
Environmental Considerations
Environmental factors such as temperature, humidity, dust, and exposure to chemicals can impact a robot’s performance and lifespan. Choose a robot designed to withstand the specific conditions of its working environment.
For example, robots in heavy industrial settings may require strong construction and protective measures against heat and particulates, whereas cleanroom robots need specific designs to prevent contamination.
Staff Training and Adaptation
Evaluate the level of training your staff will need to operate and maintain the new robotic system.
Assess whether you have the right skills available internally or if you will need to hire new staff or provide training to existing employees.
The ease of use of the robotic system and the availability of vendor training programs can also be a decisive factor. Ensuring your team is well-prepared can improve productivity and reduce downtime due to operational errors.
Future-Proofing Technology
Invest in technology that can adapt to future advancements. This includes considering whether the robotic system is equipped with abilities such as machine learning, adaptability to new software updates, and compatibility with newer technologies.
Choosing a robot that is suitable for upgrades can extend its useful life and protect your investment.
Return on Investment (ROI)
Calculate the expected return on investment (ROI) for the robotic system. This includes analyzing productivity gains, cost savings from labour reductions, and improvements in quality and consistency.
A clear understanding of the financial impact and payback period will help justify the investment and ensure that the robot meets your business objectives.
Financial planning is key to ensuring that the robot contributes positively to your bottom line.
How much in approximative costs can you expect to save on an assembly line with the help of cobots?
Integrating cobots (collaborative robots) on an assembly line can lead to cost savings of approximately 20-30% by enhancing operational efficiency and reducing labour costs. These savings are achieved through the automation of repetitive tasks and allowing human workers to focus on more complex operations.
What is the average price tag of a robot?
The cost of robots varies widely, from a few thousand dollars for basic models to several hundred thousand or more for advanced, specialized machinery.
How long does it typically take to see a return on investment from a robot purchase?
The time it takes to see a return on investment (ROI) from a robot can vary based on the type of robot and its application. However, for industrial and manufacturing settings, companies often report seeing an ROI within two to three years, especially when robots are used in high-volume or high-labor-cost tasks.
Can robots be leased or rented instead of purchased outright?
Yes, robots can be leased or rented, providing a more flexible financial option for businesses that need robotic technology but may not be ready to commit to a full purchase. Leasing or renting can also offer the advantage of keeping the technology up-to-date, as companies can upgrade to newer models at the end of the lease term.
What are the ongoing costs associated with operating a robot?
Beyond the initial purchase, the ongoing costs of operating a robot include maintenance, repairs, software updates, and possibly energy consumption. Training for personnel on how to operate and maintain the robot also adds to the costs.
Final Thoughts
Understanding the cost of robots involves considering their technological complexity, design, materials, and intended application.
This guide provides a foundational understanding to help you navigate the initial investment and long-term benefits of robotic integration.
Equipped with this knowledge, businesses can make informed decisions on their investments in robotics, ensuring they meet their operational needs and maximize return on investment.
With careful planning and consideration, integrating robotics can be a transformative investment for any enterprise.
In addition to distribution, we design and fabricate complete engineered systems, including hydraulic power units, electrical control panels, pneumatic panels & aluminum framing. Our advanced components and system solutions are found in a wide variety of industrial applications such as wind energy, solar energy, process control and more.
Cobots (collaborative robots) are becoming a vital way to help manufacturers improve their productivity. Strong, fast and simple to use, they can make production processes more efficient and business more competitive. We look at what cobots do, how they support production and how Kassow Robots has been growing since the majority stake acquisition by Bosch Rexroth.
A lot has happened in the year and a half since the Danish cobot manufacturer became part of Bosch Rexroth: With the move to a new location, it was possible to expand the production capacity in a highly professional manner and to increase revenue significantly. The team has grown: in Copenhagen, where the company was founded, at the subsidiary in Prague, and within the sales team based in Ulm. Kassow Robots has greatly expanded its global sales activities by participating in trade fairs in various countries and in events within Bosch Rexroth. The dynamic development has one constant: CEO and founder Kristian Kassow as an intensive driving force.
Cobot market continues to expand
Cobots are an important part of intelligent manufacturing and an effective measure to reduce the pressure on costs while securing production in times of workforce lack. They are increasingly used in industry to automate processes which are done in the same working space as human colleagues. Cobots enable small and medium-sized enterprises to automate with their own staff – because collaborative robots can be easily programmed and operated by almost anybody. There is already a high demand for them, and the market is set to continue expanding*.
They can perform a range of jobs easily and offer plenty of flexible automation options with significant benefits:
They can be integrated easily into the production process with minimal changes to the rest of the line – providing a cost-effective entry-point to robotic automation, which can be expanded over time.
They are fast and accurate, which improves production efficiency and helps lower overall operating costs.
They work safely alongside people.
Cobots take on laborious or repetitive tasks, enabling the human workforce to focus on more value adding tasks – which helps address skill shortages.
Seven axes and powerful flexibility
At Bosch Rexroth, we see cobots as an important and versatile part of future proof solutions for factory automation – which is why we’ve expanded our product range with the collaborative robots of Kassow Robots.
The company develops, produces and sells unique and efficient 7-axes lightweight collaborative robots for industrial applications. Their cobots are extremely user-friendly, giving companies great flexibility and enabling small and medium-sized enterprises without in-house robotics specialists to achieve complex automation and programming cost-effectively and independently.
Kassow Robots has designed its cobots to work in the tightest of production spaces. Equipped with seven axes, they can reach around corners like a human arm, and can lift a payload of up to 18 kg. Currently the product family comprises five collaborative robot models, with reaches of 850 to 1800 millimeters, and joint speeds of up to 225 degrees per second.
New products are continually in development. At this year’s Automatica, Kassow Robots presented the Edge Series: a prototype of a controller integrated into the cobot base, delivery of which will start in the beginning of 2024. With no extra controller cabinet to be placed near the cobot, the 7-axes cobots can then be used in even more flexible and space-saving ways, which is very important for mobile applications like AMRs (Autonomous Mobile Robots).
Setting business up for further growth
Thanks to the majority shareholding of Bosch Rexroth, Kassow Robots is now expanding its production and its sales activities worldwide. With CEO and co-owner Kristian Kassow leading the company, the team is primed to introduce their cobots on the world stage, through trade show participation and internal events as well as developing the sales partners network. It currently includes more than 60 partners worldwide, and it continues to grow.
Electronics engineer Nikolaj Thorup Frederiksen working on the new KR Edge Series (image source: Kassow Robots).
To facilitate this growth, Kassow Robots moved to a new location one year ago. The modern building in Kastrup near Copenhagen offers sufficient space not only for increasing production capacity, but also for development activities and offices. Higher production capacity also means more square meters for testing – the Kassow Robot cobots run through an automated test program after assembly, before being packed for delivery.
In the last almost 18 months we have gone through an exciting and challenging period of scaling up, which we mastered successfully thanks to our highly motivated team. Naturally our primary efforts have been to deliver cutting edge technology in high quality according to the market requirements.
Kristian Kassow, CEO of Kassow Robots
How do cobots work with Bosch Rexroth products?
All five Kassow Robots lightweight cobots communicate seamlessly with the control platform ctrlX CORE. Additionally, an ecosystem of drivers for easy configuration of peripheral devices, communicating with robots, like grippers and cameras, is being further expanded. So the number of compatible end-of-arm-tools and devices is steadily growing, enlarging the scope of application day by day.
The cobots can also be equipped with the Smart Flex Effector from Bosch Rexroth, which facilitates joining processes, complicated assembly movements, or difficult handling tasks that were previously impossible to master mechanically. Through the unique combination of a sensor system, with kinematics operating independently in six degrees of freedom, this compensation module gives industrial robots a sense of touch similar to the human hand.
Convincing benefits: a major order for cobots from Project Service & Production
For the restocking of cabling machines with bobbins, Project S&P, system integrator and customer of Kassow Robots, specializing in the optimization of production processes, has worked out an automation solution for the textile industry.
A flexible solution for the restocking of cabling machines with bobbins (image source: Project S&P and Kassow Robots).
To ensure the smooth changeover of yarn packages, Project S&P developed and built a mobile handling solution with a cobot. The automated guided vehicles are equipped with a magazine, a handling system and a KR1018 cobot from Kassow Robots. A linear axis is part of the solution, so that the cobot can load the cabling machines at different heights.
Beyond taking over the workforce’s job of handling very heavy weights, the automation capabilities of the 7-axes KR1018 contributes to smoother yarn package changes. The triple effect of reduced personnel costs, of better quality at the same time due to more gentle package handling and of the ability of material traceability – all this is an achievement of this automation solution. It would not be possible with a conventional 6-axes robot. The success of this has meant that a larger number of cobots are being delivered to the customer.
In addition to distribution, we design and fabricate complete engineered systems, including hydraulic power units, electrical control panels, pneumatic panels & aluminum framing. Our advanced components and system solutions are found in a wide variety of industrial applications such as wind energy, solar energy, process control and more.
Safety Over IO-Link makes it easier to align a robot’s restricted and safeguarded spaces, simplifies creation of more dynamic safety zones and allows creation of “layers” of sensors around a robot work area.
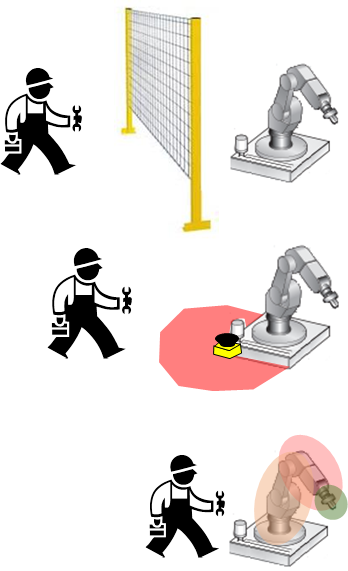
For the past several years, “collaboration” has been a hot topic in robotics. The idea is that humans and robots can work closely together, in a safe and productive manner. Changes in technology and standards have created the environment for this close cooperation. These standards call out four collaborative modes of operation: Power & Force Limiting, Hand Guiding, Safety Rated Monitored Stop, and Speed & Separation Monitoring (these are defined in ISO/TS 15066).
Power & Force Limiting
Power & Force Limiting is what many people refer to when speaking about Collaborative Robots, and it applies to robots such as Baxter from Rethink Robotics and the UR series made by Universal Robots. While the growth in this segment has been fast, there are projections that traditional robots will continue to make up 2/3 of the market through 2025, which means that many users will want to improve their traditional robot solutions to “collaborate”.
Hand Guiding
Hand guiding is the least commonly applied mode, it is used for very specific applications such as power assist (one example is loading spare tires into a new car). It generally requires special equipment mounted on the robot to facilitate the guiding function.
Safety Rated Monitored Stop and Speed & Separation Monitoring
Safety Rated Monitored Stop and Speed & Separation Monitoring are especially interesting for traditional robots, and require safety sensors and controls to be implemented. Customers wanting closer human-robot collaboration using traditional robots will need devices such as safety laser scanners, safety position sensors, safety PLCs and even safety networks – this is where Safety Over IO-Link can enable collaborative applications.
Many of IO-Link’s well-known features also provide advantages for traditional robot builders and users:
1) Faster & cheaper integration/startup through reduction in cabling, standardized connectors/cables/sensors and device parameterization.
2) Better connection between sensors and controllers supports robot supplier implementation of IIoT and improved collaboration by making it easier to gather process, device and event data – this allows improved productivity/uptime, better troubleshooting, safer machines, preventative maintenance, etc.
3) Easier alignment of the robot’s restricted and safeguarded spaces, simplifying creation of more dynamic safety zones to support closer human-robot collaboration.
The third item is especially relevant in enabling collaborative operation of traditional robots. The updated standards allow the creation of a “shared workspace” for the robot and human, and how they interact in this space depends on the collaborative mode. At a simple level, Safety Rated Monitored Stop and Speed & Separation Monitoringrequire this “shared workspace” to be monitored, this is generally accomplished using a “restricted space” and a “safeguarded space.” These “spaces” must be monitored using many sensors, both inside and outside the robot.
First, the robot’s “restricted space” is set up to limit the robot’s motion to a specific 3-dimensional volume. In the past, this was set up through hard stops, limit switches or sensors, more recently the ANSI RIA R15.06 robot standard was updated to allow this to be done in software through safety-rated soft axis and space limiting. Most robot suppliers offer a software tool such as “Safe Move” or Dual Check Safety” to allow the robot to monitor its own position and confirm it is where it is supposed to be. This feature requires safe position feedback and many sensors built into the robot. This space can change dynamically with the robot’s program, allowing more flexibility to safely move the robot and assure its location.
Second, a safeguarded space must be defined and monitored. This is monitored using safety rated sensors to track the position of people and equipment around the robot and send stop (and in some cases warning) signals to the safety controller and robot. Safety Over IO-Link helps connect and manage the safety devices, and quickly send their signals to the control system.
In the past, integrating a robot with safety meant wiring many safety sensors with long cable runs and many terminations back to a central cabinet. This was a time consuming, labor intensive process with risk of miswiring or broken cables. IO-Link significantly reduces the cost, speed and length of connections due to use of standard cables and connectors, and the network approach. It is also much simpler for customers to change their layout using the network, master & hub approach.
Customers wanting collaborative capability in traditional robots will find that Safety Over IO-Link can significantly simplify and reduce the cost of the process of integrating the many advanced safety sensors into the application.
In addition to distribution, we design and fabricate complete engineered systems, including hydraulic power units, electrical control panels, pneumatic panels & aluminum framing. Our advanced components and system solutions are found in a wide variety of industrial applications such as wind energy, solar energy, process control and more.
In a previous blog, we discussed how “Safety Over IO-Link Helps Enable Human-Robot Collaboration”. It was a fairly narrow discussion of collaborative robot modes and how sensors and networks can make it easier to implement these modes and applications. This new blog takes a broader look at the critical role safety plays in the intersection between the machine and the user.
In the past, the machine guarding philosophy was to completely separate the human from the machine or robot. Unfortunately, this resulted in the paradigm of “safety vs. productivity” — you either had safety or productivity, but you couldn’t have both. This paradigm is now shifting to “safety & productivity”, driven by a combination of updated standards and new technologies which allow closer human-machine interaction and new modes of collaborative operation.
The typical machine/robot guarding scheme of the past used fences or hard guards to separate the human from the machine. Doors were controlled with safety interlock switches, which required the machine to stop on access, such as to load/unload parts or to perform maintenance or service, and this reduced productivity. It was also not 100% effective because workers inside a machine area or work cell might not be detected if another worker restarted the stopped machine. Other drawbacks included the cost of space, guarding, installation, and difficultly changing the work cell layout once hard guarding had been installed.
We’ve now come to an era when our technology and standards allow improved human access to the machine and robot cell. We’re starting to think about the human working near or even with the machine/robot. The robot and machinery standards have undergone several changes in recent years and now allow new modes of operation. These have combined with new safety technologies to create a wave of robot and automation suppliers offering new robots, controllers, safety and other accessories.
Standards Machine and robot safety standards have undergone rapid change in recent years. Standard IEC 61508, and the related machinery standards EN/ISO 13849-1 and EN/IEC 62061, take a functional approach to safety and define new safety performance levels. This means they focus more on the functions needed to reduce each risk and the level of performance required for each function, and less on selection of safety components. These standards helped define, and made it simpler and more beneficial, to apply safety PLCs and advanced safety components. There have also been developments in standards related to safe motion (61800-5-2) which now allow more flexible modes of motion under closely controlled conditions. And the robot standards (10218, ANSI RIA 15.06, TS15066) have made major advances to allow safety-rated soft axes, space limiting and collaborative modes of operation.
Technology On the technology side, innovations in sensors, controllers and drives have changed the way humans interact with machines and enabled much closer, more coordinated and safer operation. Advanced sensors, such as safety laser scanners and 3D safety cameras, allow creation of work cells with zones, which makes it possible for an operator to be allowed in one zone while the robot performs tasks in a different zone nearby. Controllers now integrate PLC, safety, motion control and other functions, allowing fast and precise control of the process. And drives/motion systems now operate in various modes which can limit speed, torque, direction, etc. in certain modes or if someone is detected nearby.
Sensors and Networks The monitoring of these robots, machines and “spaces” requires many standard and safety sensors, both inside and outside the machine or robot. But having a lot of sensors does not necessarily allow the shift from “productivity vs. safety” to “productivity & safety” — this requires a closely coordinated and integrated system, including the ability to monitor and link the “restricted space” and “safeguarded space.” This is where field busses and device-level networks can enable tight integration of devices with the control system. IO-Link masters and Safety Over IO-Link hubs allow the connection of a large number of devices to higher level field busses (ProfiNet/ProfiSafe) with effortless device connection using off-the-shelf, non-shielded cables and connectors.
Balluff offers a wide range of solutions for robot and machine monitoring, including a broad safety device portfolio which includes safety light curtains, safety switches, inductive safety sensors, an emergency stop device and a safety hub. Our sensors and networks support the shift to include safety without sacrificing productivity.
To learn more about Safety over IO-Link, visit www.balluff.com
In addition to distribution, we design and fabricate complete engineered systems, including hydraulic power units, electrical control panels, pneumatic panels & aluminum framing. Our advanced components and system solutions are found in a wide variety of industrial applications such as wind energy, solar energy, process control and more.









 The typical machine/robot guarding scheme of the past used fences or hard guards to separate the human from the machine. Doors were controlled with safety interlock switches, which required the machine to stop on access, such as to load/unload parts or to perform maintenance or service, and this reduced productivity. It was also not 100% effective because workers inside a machine area or work cell might not be detected if another worker restarted the stopped machine. Other drawbacks included the cost of space, guarding, installation, and difficultly changing the work cell layout once hard guarding had been installed.
The typical machine/robot guarding scheme of the past used fences or hard guards to separate the human from the machine. Doors were controlled with safety interlock switches, which required the machine to stop on access, such as to load/unload parts or to perform maintenance or service, and this reduced productivity. It was also not 100% effective because workers inside a machine area or work cell might not be detected if another worker restarted the stopped machine. Other drawbacks included the cost of space, guarding, installation, and difficultly changing the work cell layout once hard guarding had been installed.